Speech recognition (SR) is the inter-disciplinary sub-field of computational linguistics that develops methodologies and technologies that enables the recognition and translation of spoken language into text by computers.
Speech recognition
Speech problems
- Automatic speech recognition
- Spontaneous vs read speech
- Large vocabulary
- In noise
- Low resource
- Far-field
- Accent-independent
- Speaker-adaptive
- Text to speech
- Low resource
- Realistic prosody
- Speaker identification
- Speech enhancement
- Speech separation
Acoustic representation
Speech physical realization
- Waves of changing air pressure.
- Realised through excitation from the vocal cords
- Modulated by the vocal tract.
- Modulated by the articulators (tongue, teeth, lips)
- Converted to Voltage with a microphone
- Sampled with an Analogue to Digital Converter
- Human hearing is 50Hz-20kHz
- Human speech is 85Hz–8kHz
- Contemporary speech processing mostly around 16kHz 16bits/sample
We want a low-dimensionality representation, invariant to speaker, background noise, rate of speaking etc.
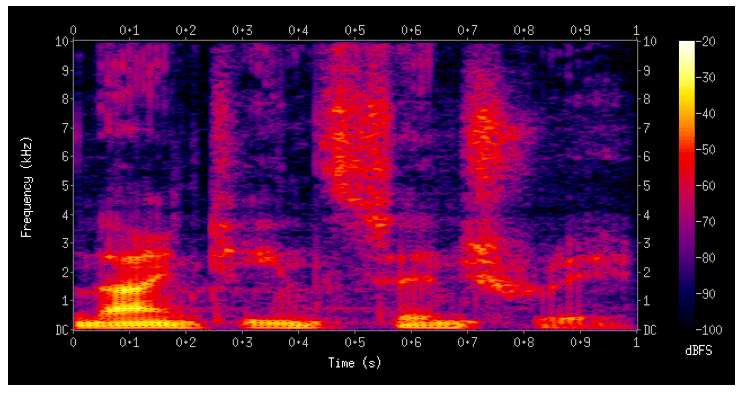
- Fourier analysis shows energy in different frequency bands
- windowed short-term fast Fourier transform (FFT)
- e.g. FFT on overlapping 25ms windows (400 samples) taken every 10ms
- Energy vs frequency [discrete] vs time [discrete]
- can hadle it as images
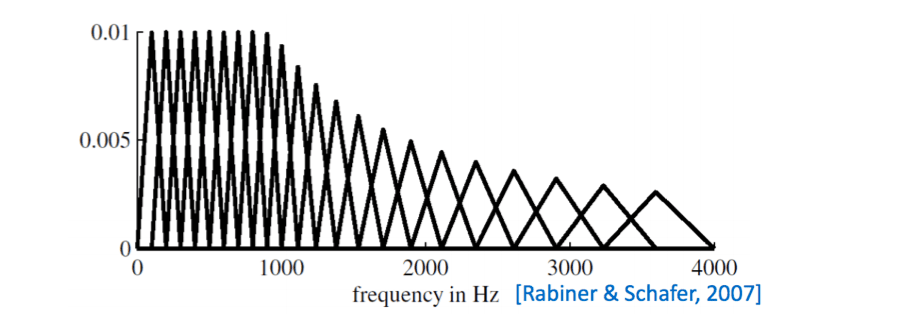
Mel frequency representation
FFT is still too high-dimensional for conventional ASR system
Downsample by local weighted averages on mel scale non-linear spacing, and take a log. \[ m = 1127\ln(1+\frac{f}{700}) \]
Result in log-mel features (default for neural network speech modelling.)
40+ dimensional features per frame
MFCC
Mel Frequency Cepstral Coefficients - MFCCs are the discrete cosine transformation of the mel filterbank energies. Whitened and low-dimensional.
- Similar to Principal Components of log spectra
- GMM speech recognition systems may use 13 MFCCs
Perceptual Linear Prediction – a common alternative representation.
Frame stacking- it’s common to concatenate several consecutive frames.
- e.g. 26 for fully-connected DNN. 8 for LSTM.
GMMs used local differences (deltas) and second-order differences (delta-deltas) to capture dynamics. (13 + 13 + 13 dimensional). Ultimately use 39 dimensional linear discriminant analysis ( class-aware PCA) projection of 9 stacked MFCC vectors.
Phonetic representation
Speech evolved as communication to convey information, consists of sentences (in ASR we usually talk about “utterances”). Sentences composed of words.
Minimal unit is a “phoneme”
- Minimal unit that distinguishes one word from another
- Set of 40-60 distinct sounds
- Vary per language
- Universal representations
- IPA: international phonetic alphabet
- X-SAMPA (ASCII)
Homophones
- distinct words with the same pronunciation: “there” vs “their”
Prosody
- How something is said can convey meaning.
Datasets
- TIMIT
- Hand-marked phone boundaries given
- 630 speakers × 10 utterances
- Wall Street Journal (WSJ) 1986 Read speech. WSJ0 1991, 30k vocab
- Broadcast News (BN) 1996 104 hours
- Switchboard (SWB) 1992. 2000 hours spontaneous telephone speech 500 speakers
- Google voice search
- anonymized live traffic 3M utterances 2000 hours
- hand-transcribed 4M vocabulary.
- Constantly refreshed, synthetic reverberation + additive noise
- DeepSpeech 5000h read (Lombard) speech + SWB with additive noise.
- YouTube 125,000 hours aligned captions (Soltau et al., 2016)
History
- 1960s Dynamic Time Warping
- 1970s Hidden Markov Models
- Multi-layer perceptron 1986
- Speech recognition with neural networks 1987–1995
- Superseded by GMMs 1995–2009
- Neural network features 2002–
- Deep networks 2006– (Hinton, 2002)
- Deep networks for speech recognition
- Good results on TIMIT (Mohamed et al., 2009)
- Results on large vocabulary systems 2010 (Dahl et al., 2011)
- Google lunches DNN ASR product 2011
- Dominant paradigm for ASR 2012 (Hinton et al., 2012)
- Recurrent networks for speech recognition 1990, 2012-
- New models (attention, LAS, neural transducer)
Probabilistic speech recognition
Speech signal represented as an observation sequence \(o = \{o_t\}\), we want to find the most likely word sequence \(\hat{w}\).
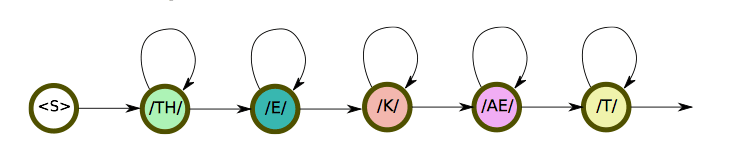
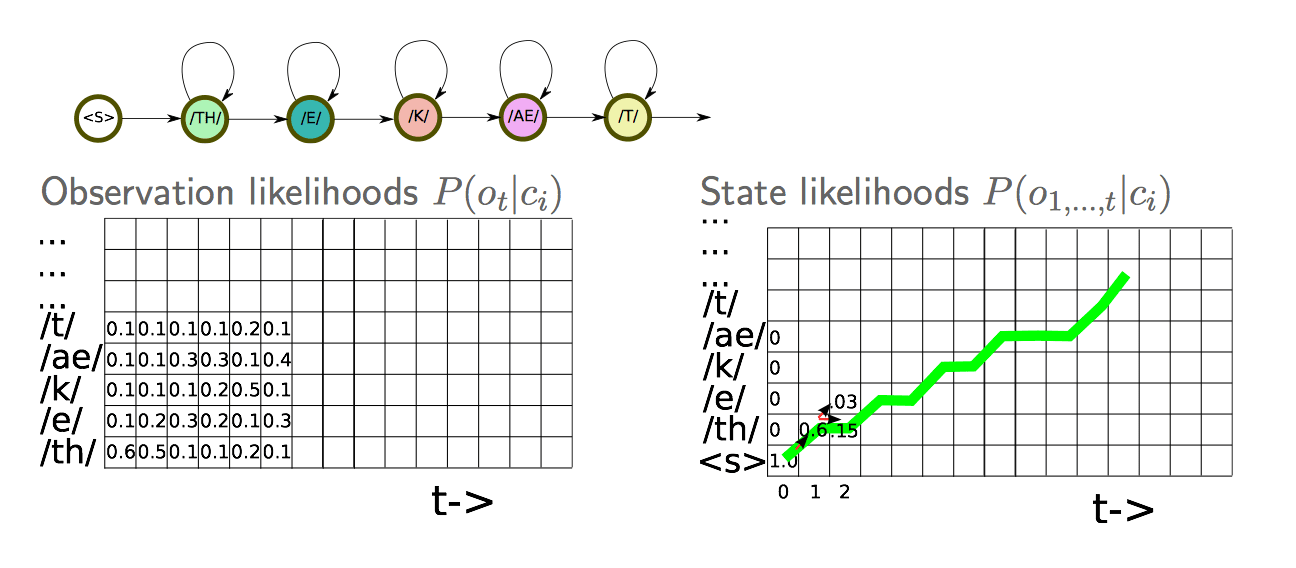
We model this with a Hidden Markov Model.
The system has a set of discrete states, transitions from state to state according to transition probabilities (Markovian: memoryless)
Acoustic observation when making a transition is conditioned on state alone. \(P(o_t|c_t)\)
We seek to recover the state sequence and consequently the phoneme sequence and consequently the word sequence.
We choose the decoder output as the most likely sequence \(\hat{w}\) from all possible sequences, \(Σ∗\), for an observation sequence \(o\): \[ \begin{align} \hat{w} & = \arg\max_{w\in\sum*}P(w|o) \\ & = \arg\max_{w\in\sum*}P(o|w)P(w) \\ \end{align} \] A product of Acoustic model and Language model scores. \[ P(o|w) = \sum_{d,c,p}P(o|c)P(c|p)P(p|w) \] Where \(p\) is the phone sequence and \(c\) is the state sequence.
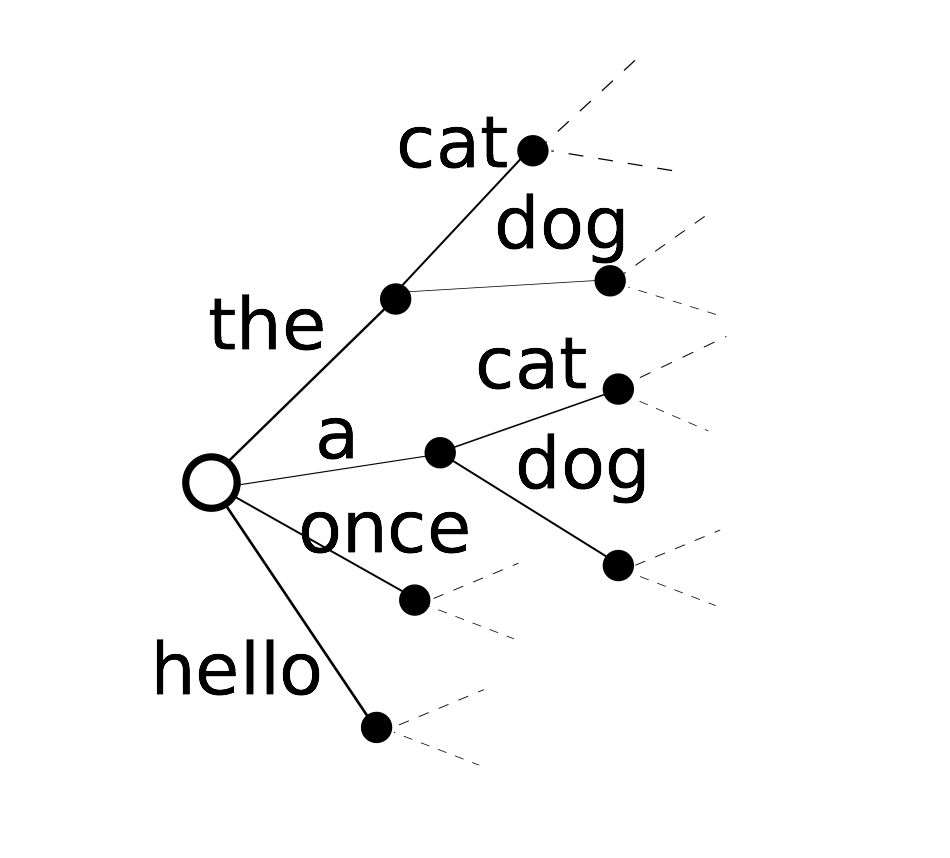
We can model word sequences with a language model: \[ P(w_1, w_2, ..., w_N) = P(w_0)\prod P(w_i|w_0, ..., w_{i-1}) \] Speech recognition as transduction
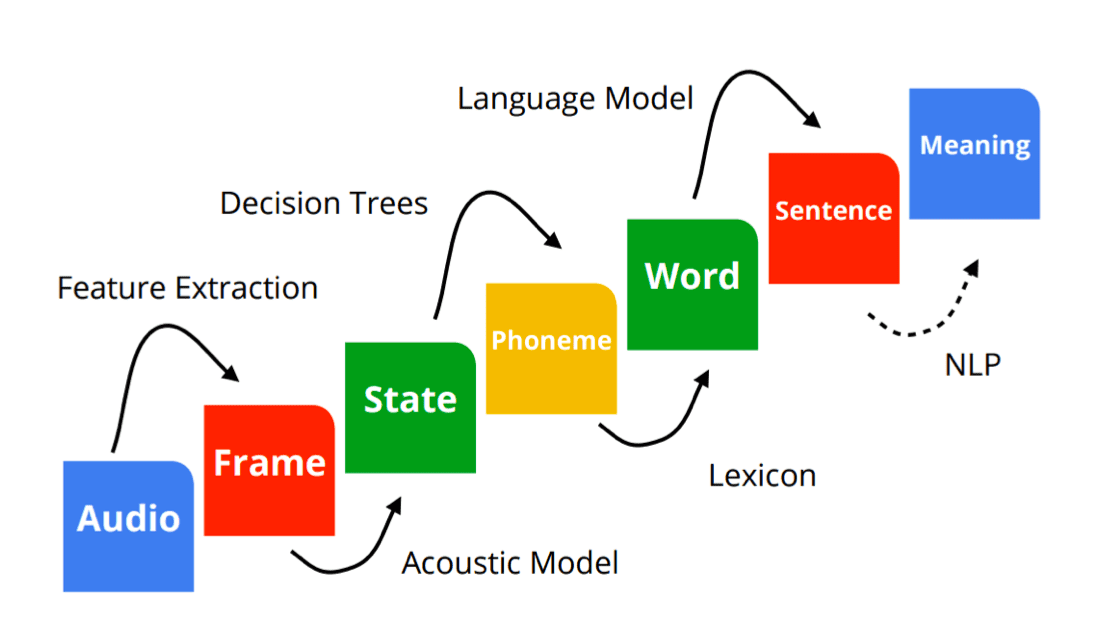
Lexicon: phoneme to word
Construct graph using Weighted Finite State Transducers (WFST).
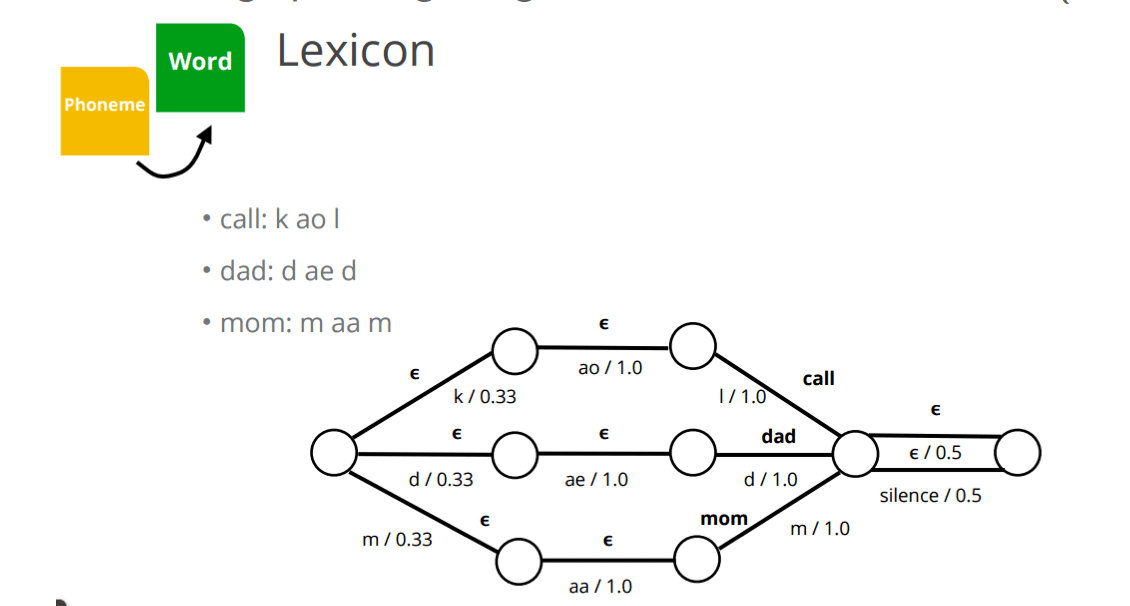
Compose Lexicon FST with Grammar FST \(L \circ G\).
Phonetic Unites
- Phonemes: “cat” → /K/, /AE/, /T/
- Context independent HMM states \(k1, k2...\)
- Context dependent states
- Context dependent phones
- Diphones (pairs of half-phones)
- Syllables
- Word-parts cf Machine translation (Wu et al., 2016)
- Characters (graphemes)
- Whole words Sak et al. (2014a, 2015); Soltau et al. (2016)
- Hard to generalize to rare words
Choice depends on language, size of dataset, task, resources available.
The difference between Phone and Phoneme
A phoneme is the smallest structural unit that distinguishes meaning in a language. Phonemes are not the physical segments themselves, but are cognitive abstractions or categorizations of them.
On the other hand, phones refer to the instances of phonemes in the actual utterances - i.e. the physical segments.
For example:
the words "madder" and "matter" obviously are composed of distinct phonemes; however, in american english, both words are pronounced almost identically, which means that their phones are the same, or at least very close in the acoustic domain.
Context dependent phonetic clustering
A phone’s realization depends on the preceding and following context, could improve discrimination if we model different contextual realizations separately:
- AE preceded by K, followed by T: AE+T-K
But, if we have 42 phones, and 3 states per phone, there are \(3 × 42^3\) context-dependent phones, But most of these won't be observed.
So cluster – group together similar distributions and train a joint model. Have a “back-off” rule to determine which model to use for unobserved contexts. Usually a decision tree.
Gaussian Mixture Models (GMM)
- Dominant paradigm for ASR from 1990 to 2010
Model the probability distribution of the acoustic features for each state: \[ P(o_t|c_i) = \sum_j w_{ij}N(o_t;\mu_{ij}, \sigma_{ij}) \] Often use diagonal covariance Gaussians to keep number of parameters under control.
Train by the E-M algorithm (Dempster et al., 1977) alternating:
- M: forced alignment computing the maximum-likelihood state sequence for each utterance
- E: parameter \((µ, σ)\) estimation
Complex training procedures to incrementally fit increasing numbers of components per mixture.
- More components, better fit. 79 parameters / component.
Given an alignment mapping audio frames to states, this is parallelizable by state. But hard to share parameters / data across states.
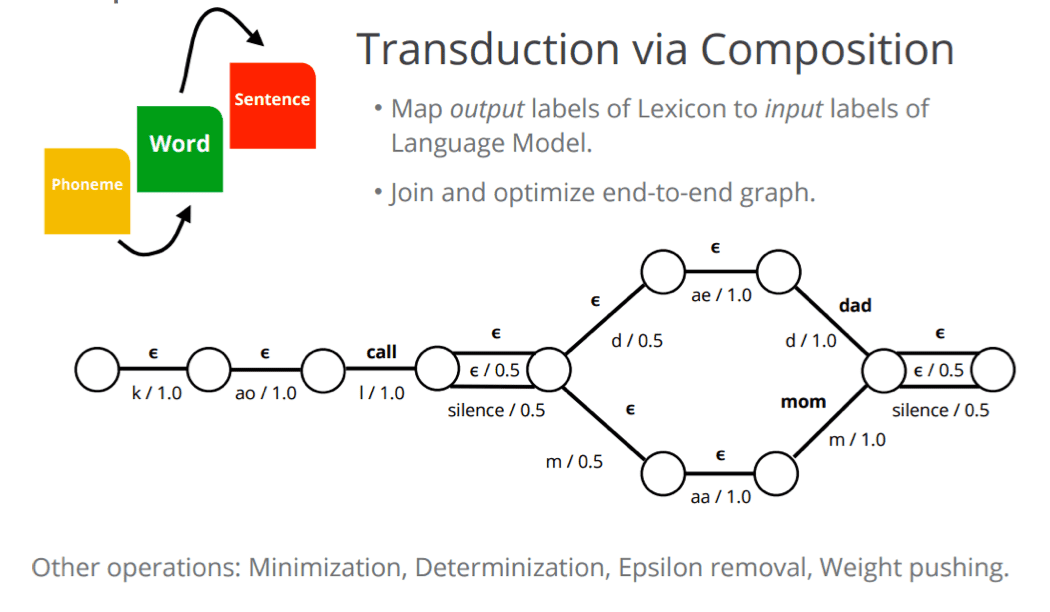
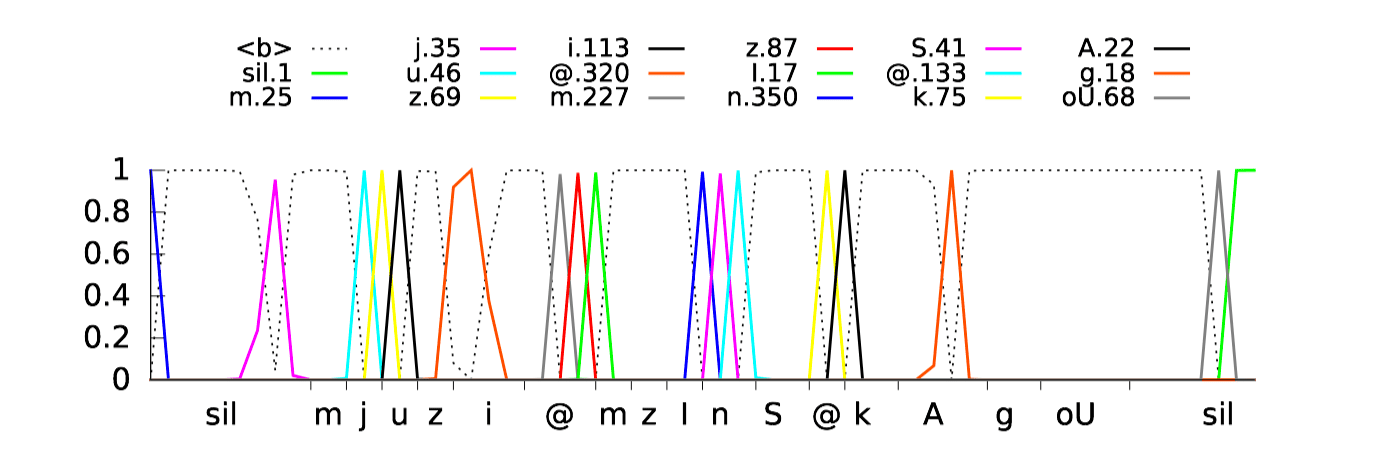
Forced alignment
Forced alignment uses a model to compute the maximum likelihood alignment between speech features and phonetic states. For each training utterance, construct the set of phonetic states for the ground truth transcription. Use Viterbi algorithm to find ML monotonic state sequence under constraints such as at least one frame per state. Results in a phonetic label for each frame, which can give hard or soft segmentation.
With a transducer with states \(ci\):

Compute state likelihoods at time \(t\): \[ P(o_{1, ...., t}|c_i) = \sum_j P(o_t|c_j)P(o_{1, ..., t}|c_j)P(c_j|c_i) \] With transition probabilities: \(P(c_i|c_j)\), find the best path: \[ P(o_{1, ..., t}|c_i) = \max_j P(o_t|c_j)P(o_{1, ..., t}|c_j)P(c_i|c_j) \] I do not quite understand the image below actually:
Decoding
Speech recognition unfolds in much the same way. Now we have a graph instead of a straight-through path.
- Optional silences between words
- Alternative pronunciation paths.
Typically use max probability, and work in the log domain. Hypothesis space is huge, so we only keep a “beam” of the best paths, and can lose what would end up being the true best path.
Neural network speech recognition
Two main paradigms
- Use neural networks to compute nonlinear feature representations.
- “Bottleneck” or “tandem” features (Hermansky et al., 2000)
- Low-dimensional representation is modelled conventionally with GMMs.
- Allows all the GMM machinery and tricks to be exploited.
- Use neural networks to estimate phonetic unit probabilities.
Neural network features
Train a neural network to discriminate classes. Use output or a low-dimensional bottleneck layer representation as features.
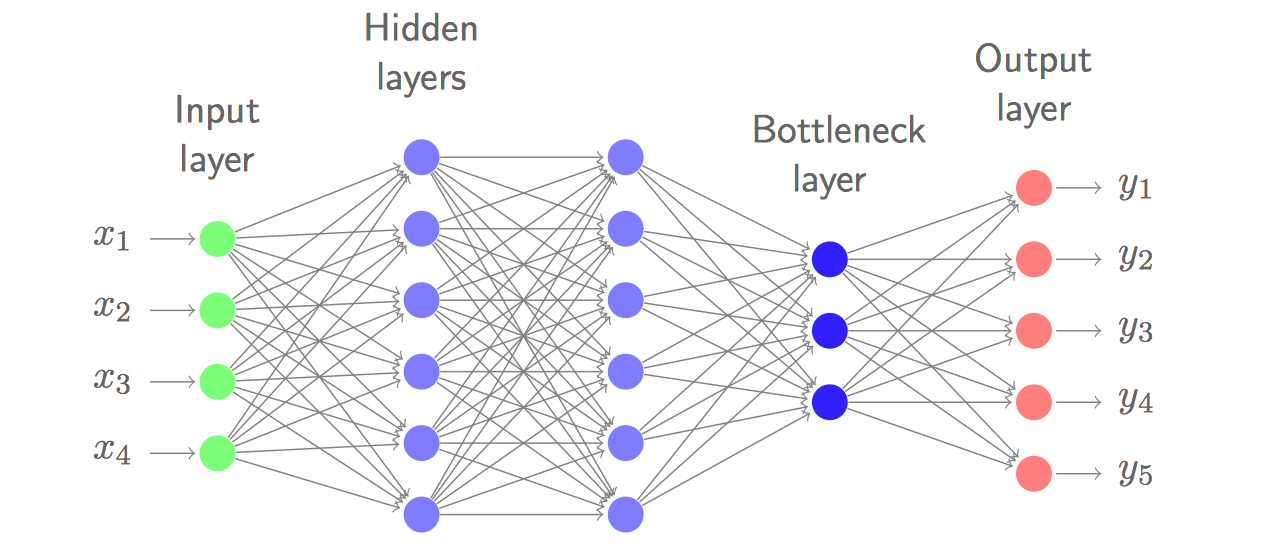
- TRAP: Concatenate PLP-HLDA features and NN features.
- Bottleneck outperforms posterior features (Grezl et al., 2007)
- Generally DNN features + GMMs reach about the same performance as hybrid DNN-HMM systems, but are much more complex.
Hybrid neural networks
Train the network as a classifier with a softmax across the phonetic units. Train with cross-entropy. Softmax will converge to posterior across phonetic states: \(P(c_i|o_i)\).
Now we model \(P(o|c)\) with a Neural network instead of a Gaussian Mixture model. Everything else stays the same. \[ P(o|c) = \prod_{t}P(o_t|c_t) \]
\[ \begin{align} P(o_t|c_t) & = \frac{P(c_t|o_t)P(o_t)}{P(c_t)} \\ & \varpropto \frac{P(c_t|o_t)}{P(c_t)} \\ \end{align} \]
For observations \(o_t\) at time \(t\) and a CD state sequence \(c_t\). We can ignore \(P(o_t)\) since it is the same for all decoding paths.
The last term is called the “scaled posterior”: \[ \log P(o_t|c_t) = \log P(c_t|o_t) - \alpha \log P(c_t) \] Empirically (by cross validation) we actually find better results with a “prior smoothing” term \(α ≈ 0.8\).
Input features
Neural networks can handle high-dimensional features with correlated features. Use (26) stacked filterbank inputs. (40-dimensional mel-spaced filterbanks).
Example filters learned in the first layer of a fully-connected network:
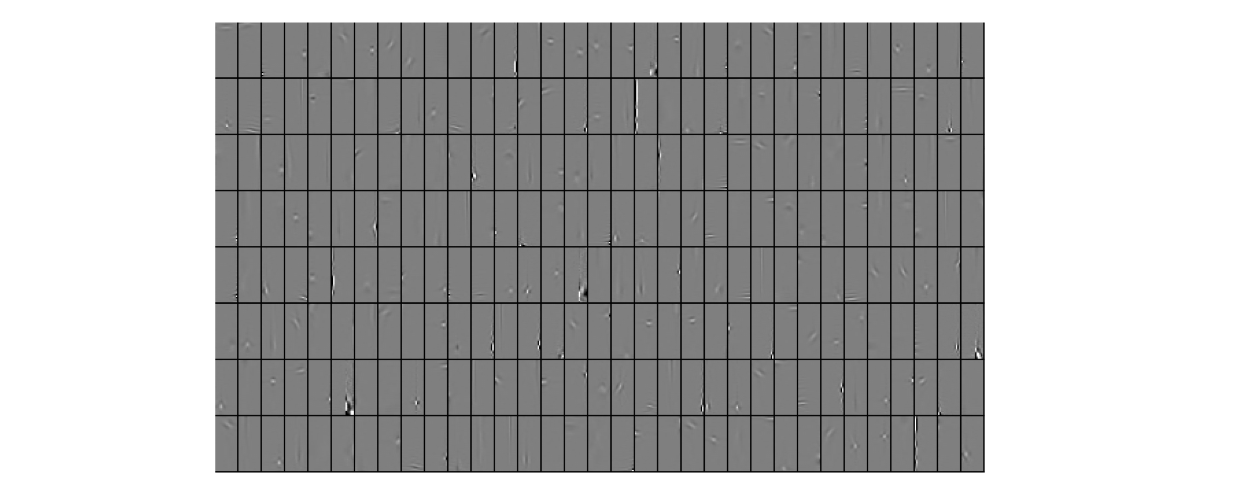
- (33 x 8 filters. Each subimage 40 frequency vs 26 time.)
Network architectures
- Fully connected
- CNN
- Time delay neural networks
- Waibel et al. (1989)
- Dilated convolutions
- CNNs in time or frequency domain. Abdel-Hamid et al. (2014); Sainath et al. (2013)
- Wavenet (van den Oord et al., 2016)
- Time delay neural networks
- RNN
- RNN (Robinson and Fallside, 1991)
- LSTM Graves et al. (2013)
- Deep LSTM-P Sak et al. (2014b)
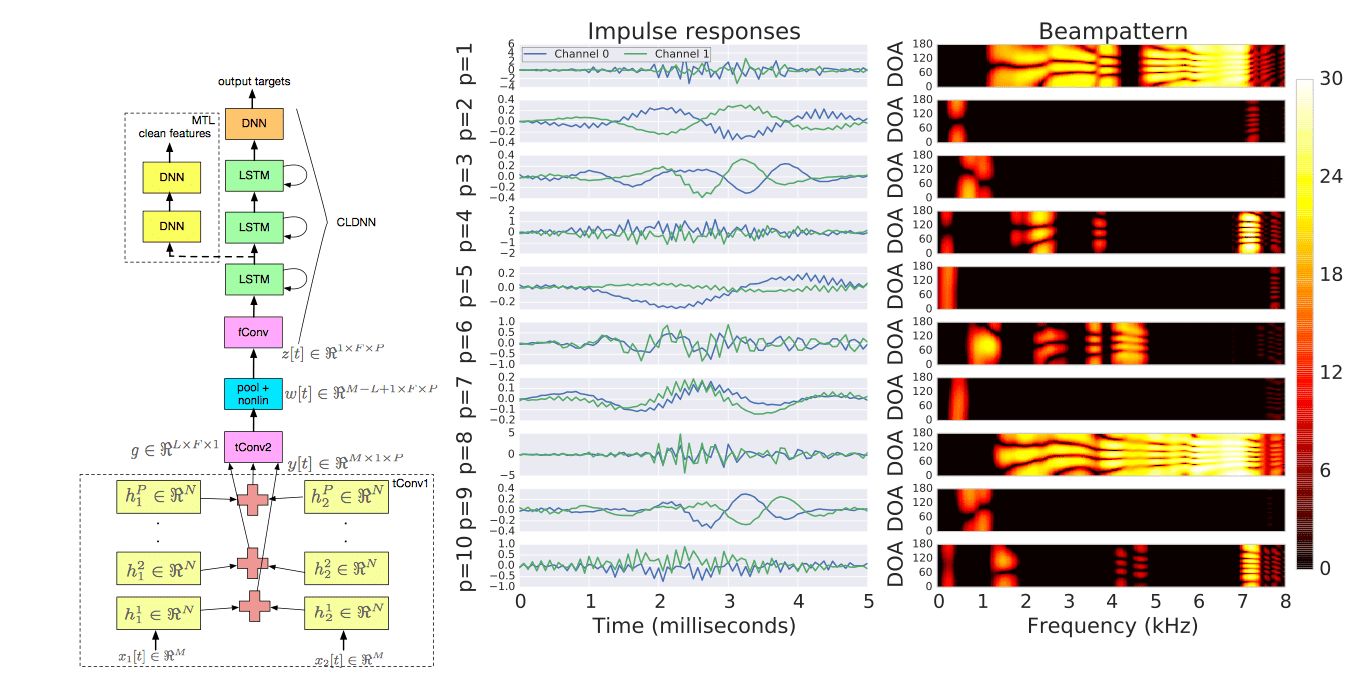
- CLDNN (right) (Sainath et al., 2015a)
- GRU. DeepSpeech 1/2 (Amodei et al., 2015)
- Bidirectional (Schuster and Paliwal, 1997) helps, but introduces latency.
- Dependencies not long at speech frame rates (100Hz).
- Frame stacking and down-sampling help.
Human parity in speech recognition (Xiong et al., 2016)
- Ensemble of BLSTMs
- i-vectors for speaker normalization
- i-vector is an embedding of audio trained to discriminate between speakers. (Speaker ID)
- Interpolated n-gram + LSTM language model.
- 5.8% WER on SWB (vs 5.9% for human).
Traning losses
Cross Entropy Training
GMMs were trained with Maximum Likelihood
Conventional training uses Cross-Entropy loss. \[ L_{X\ ENT}(o_t, \theta) = \sum_{i=1}^Ny_t(i)\log\frac{y_t(i)}{\hat{y_t}(i)} \]
With large data we can use Viterbi (binary) targets: \(y_t ∈ {0, 1}\)
- − i.e. a hard alignment.
Can also use a soft (Baum-Welch) alignment (Senior and Robinson, 1994)
Connectionist Temporal Classification (Graves et al., 2006)
CTC is a bundle of alternatives to conventional system:
CTC introduces an optional blank symbol between the ”real” labels.
Simple to implement in the FST framework

Continuous realignment — no need for a bootstrap model
Always use soft targets.
Don’t scale by posterior.
Similar results to conventional training.
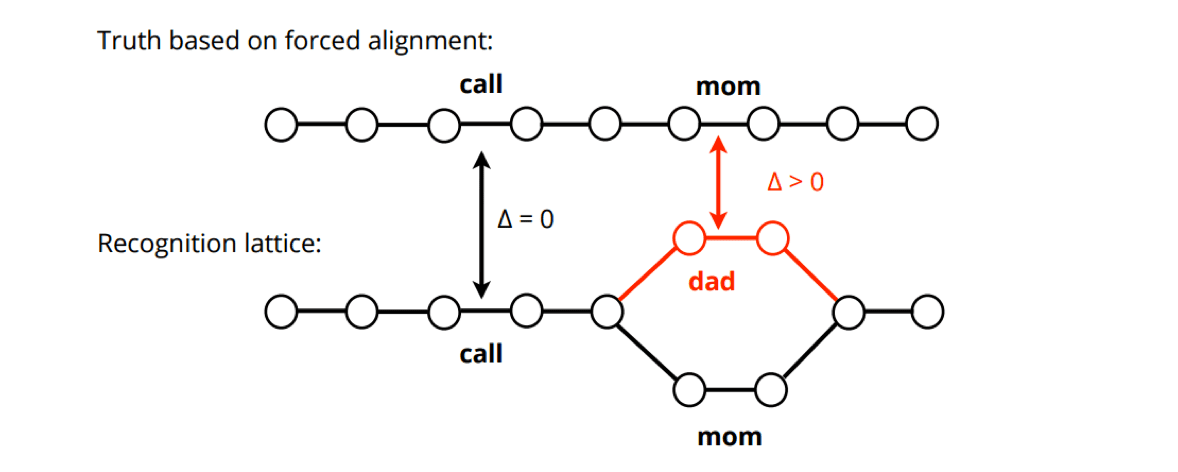
Sequence discriminative training
Conventional training uses Cross-Entropy loss
- Tries to maximize probability of the true state sequence given the data.
We care about Word Error Rate of the complete system. Design a loss that’s differentiable and closer to what we care about.
- Applied to neural networks (Kingsbury, 2009).
- Posterior scaling gets learnt by the network.
- Improves conventional training and CTC by 15% relative.
- bMMI, sMBR(Povey et al., 2008)
\[ P(S_r|X_r) = \frac{p(X_r, S_r)}{\sum_S p(X_r, S)} = \frac{p(X_r|S_r)P(S_r)}{\sum_Sp(X_r|S)P(S)} \]
\[ L_{mmi}(\theta) = -\sum_{r=1}^R\log P(S_r|X_r) \]
New architectures
Seq2seq
Basic sequence2sequence not that good for speech
- Utterances are too long to memorize
- Monotonicity of audio (vs Machine Translation)
Models
- Attention + seq2seq for speech (Chorowski et al., 2015)
- Listen, Attend and Spell (Chan et al., 2015)
Output characters until EOS, incorporates language model of training set. Harder to incorporate a separately-trained language model. (e.g. trained on trillions of tokens)
Watch, Listen, Attend and Spell (Chung et al., 2016)
Apply LAS to audio and video streams simultaneously.
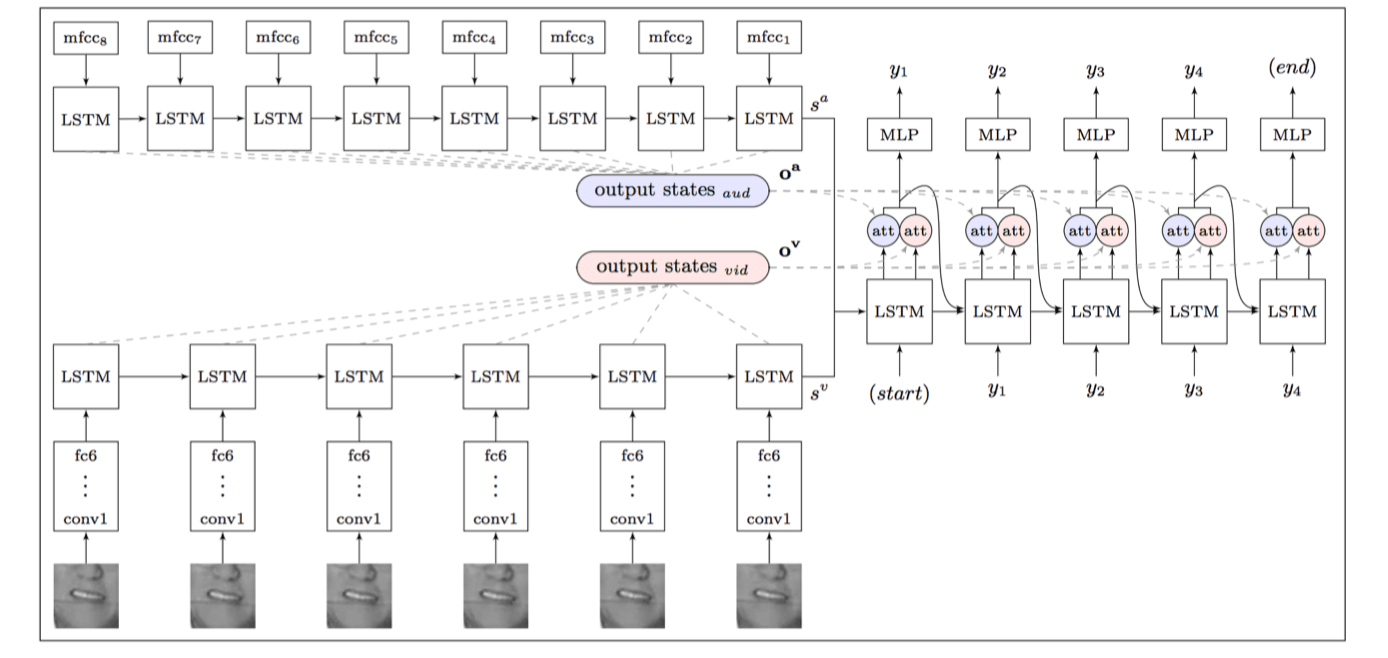
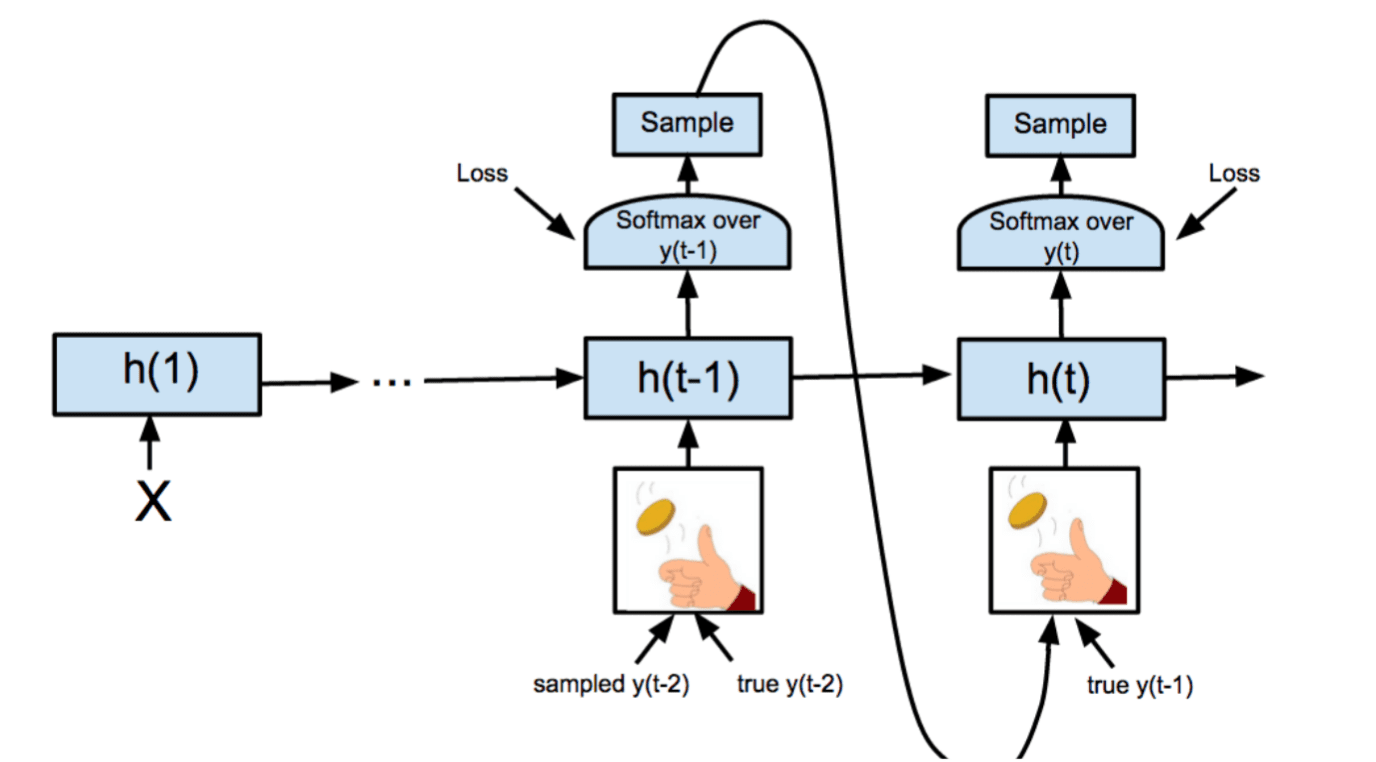
Train with scheduled sampling (Bengio et al., 2015)
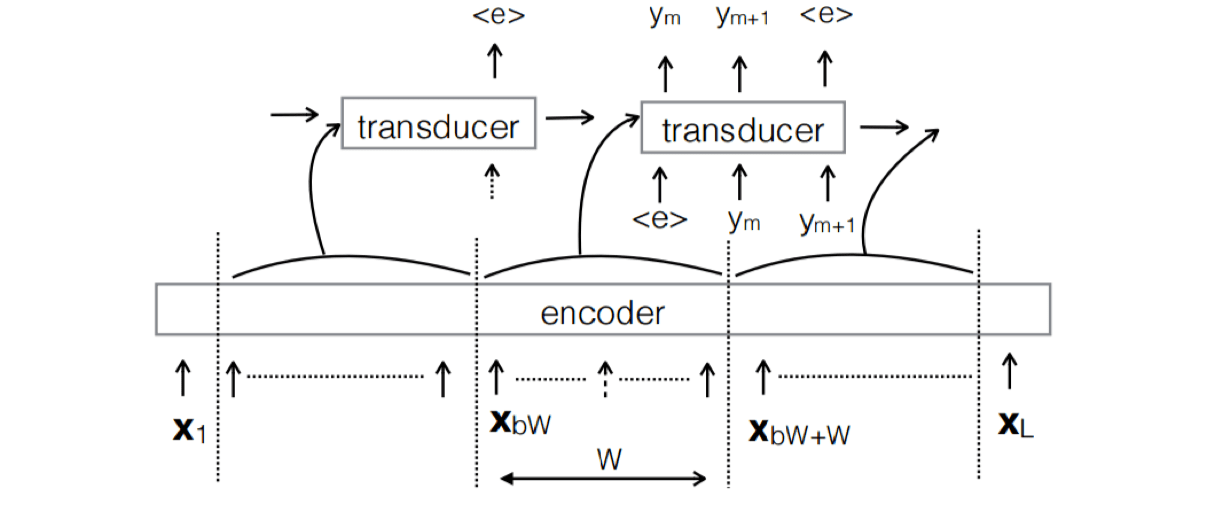
Neural transducer (Jaitly et al., 2015)
Seq2seq models require the whole sequence to be available. Introduce latency compared to unidirectional.
Solution: Transcribe monotonic chunks at a time with attention.
![]()
Raw waveform speech recognition
We typically train on a much-reduced dimensional signal.
- Would like to train end-to-end.
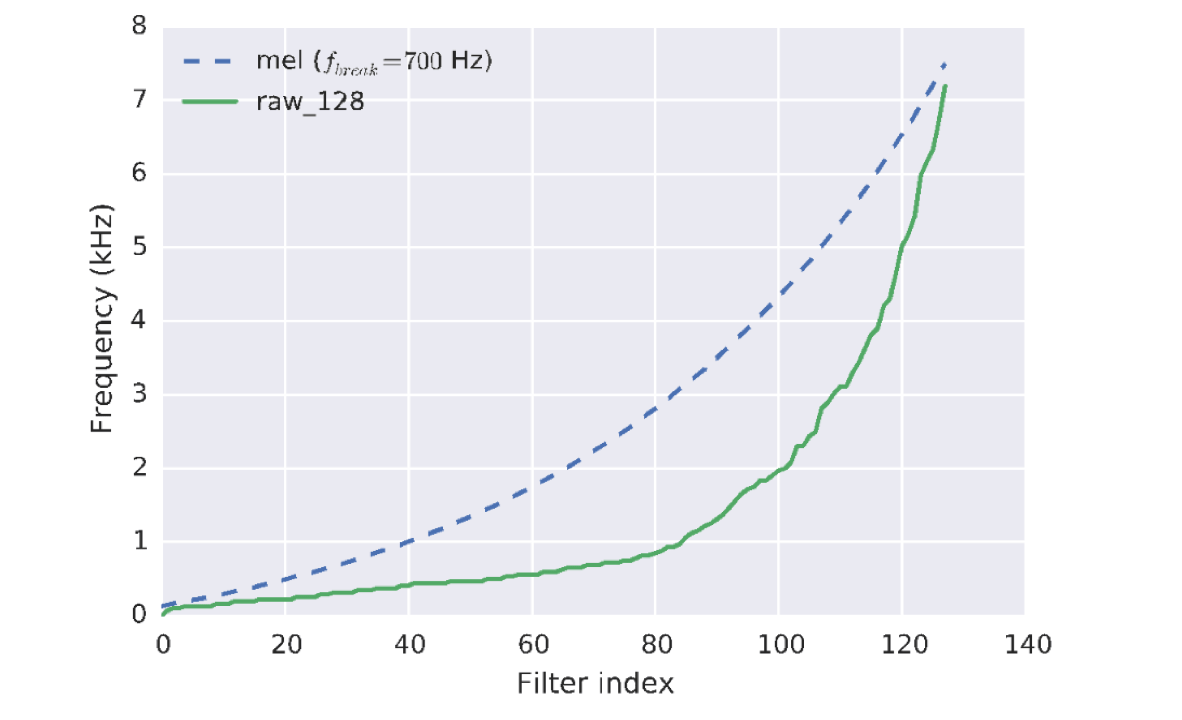
- Learn filterbanks, instead of hand-crafting.
A conventional RNN at audio sample rate can’t learn long-enough dependencies.
- Add a convolutional filter to a conventional system e.g. CLDNN (Sainath et al., 2015b)
- WaveNet-style architecture
- Clockwork RNN (Koutn´ık et al., 2014)
- Run a hierarchical RNN at multiple rates.
Frequency distribution of learned filters differs from hand-initialization:
Speech recognition in noise
- Multi-style training (“MTS”)
- Collect noisy data.
- Or, add realistic but randomized noise to utterances during training.
- e.g. Through a “room simulator” to add reverberation.
- Optionally add a clean-reconstruction loss in training.
- Train a denoiser
- NB Lombard effect – voice changes in noise.
Multi-microphone speech recognition
Multiple microphones give a richer representation, “closest to the speaker” has better SNR.
Beamforming
- Given geometry of microphone array and speed of sound
- Compute Time Delay of Arrival at each microphone
- Delay-and-sum: Constructive interference of signal in chosen direction.
- Destructive interference depends on direction / frequency of noise.
More features for a neural network to exploit.
- Important to preserve phase information to enable beam-forming
Factored multichannel raw waveform CLDNN (Sainath et al., 2016)